

Команды ДВФУ по подводной робототехнике
Автор: Команды ДВФУ по подводной робототехнике
Руководитель: Павел Ефимов

Цель проекта
Наполнение лаборатории ДВФУ в области проектирования, изучения и разработки необитаемых подводных аппаратов и систем (НПА), разработка модулей и систем подводных аппаратов для решения проблем мирового океана, развитие и организация эффективного взаимодействия студентов в области проектного подхода к обучению, на реальных задачах-кейсах, предоставляемых заказчиками в области подводной робототехники
Разработанные робототехнические комплексы
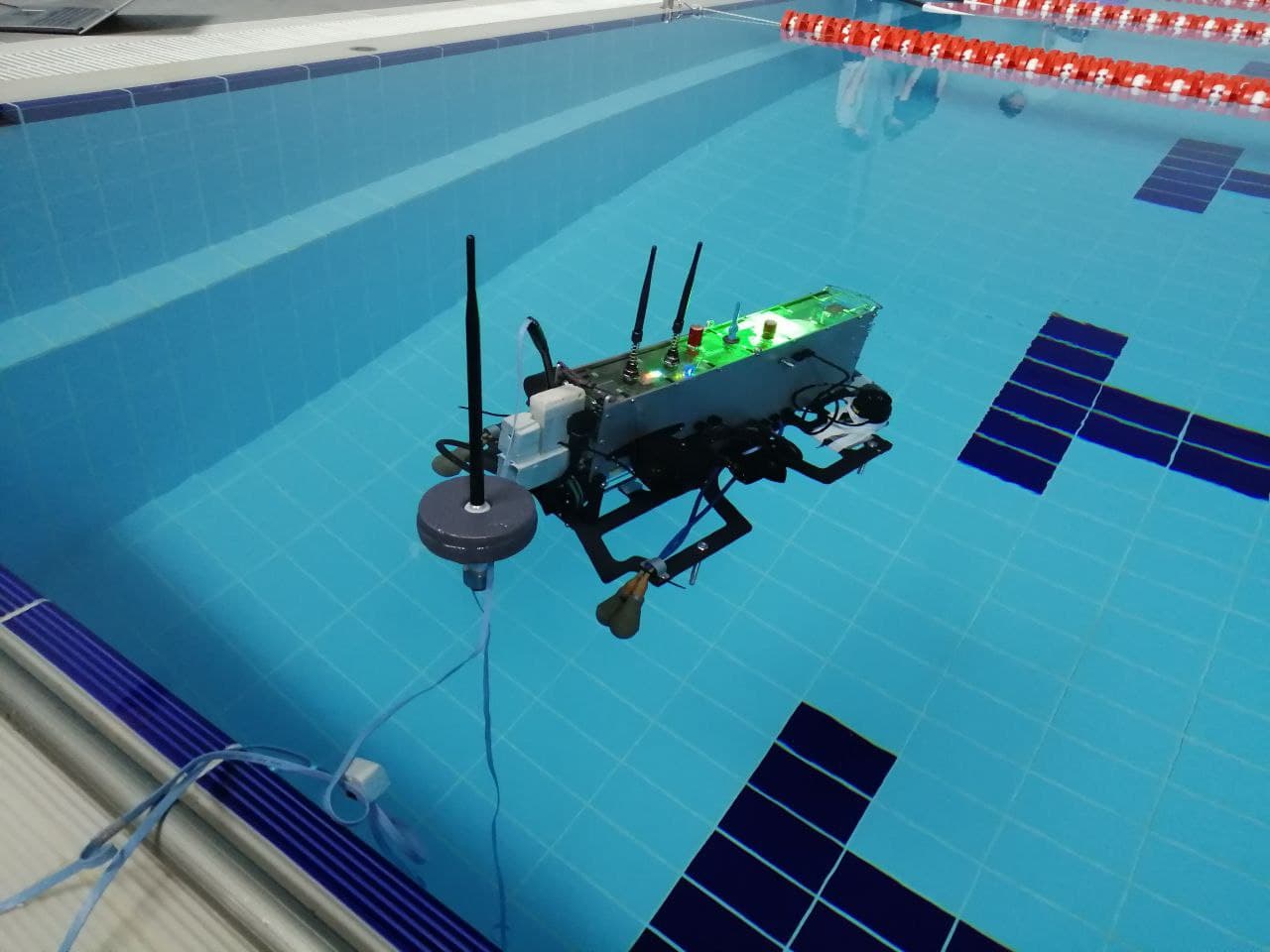
- Сверхманёвренный телеуправляемый необитаемый подводный аппарат «Сокол тысячелетия». Изготовлен для экспериментального подтверждения алгоритмов управления ТНПА при любой пространственной ориентации и участия во Всероссийских соревнованиях «Аквароботех» (г. Владивосток).
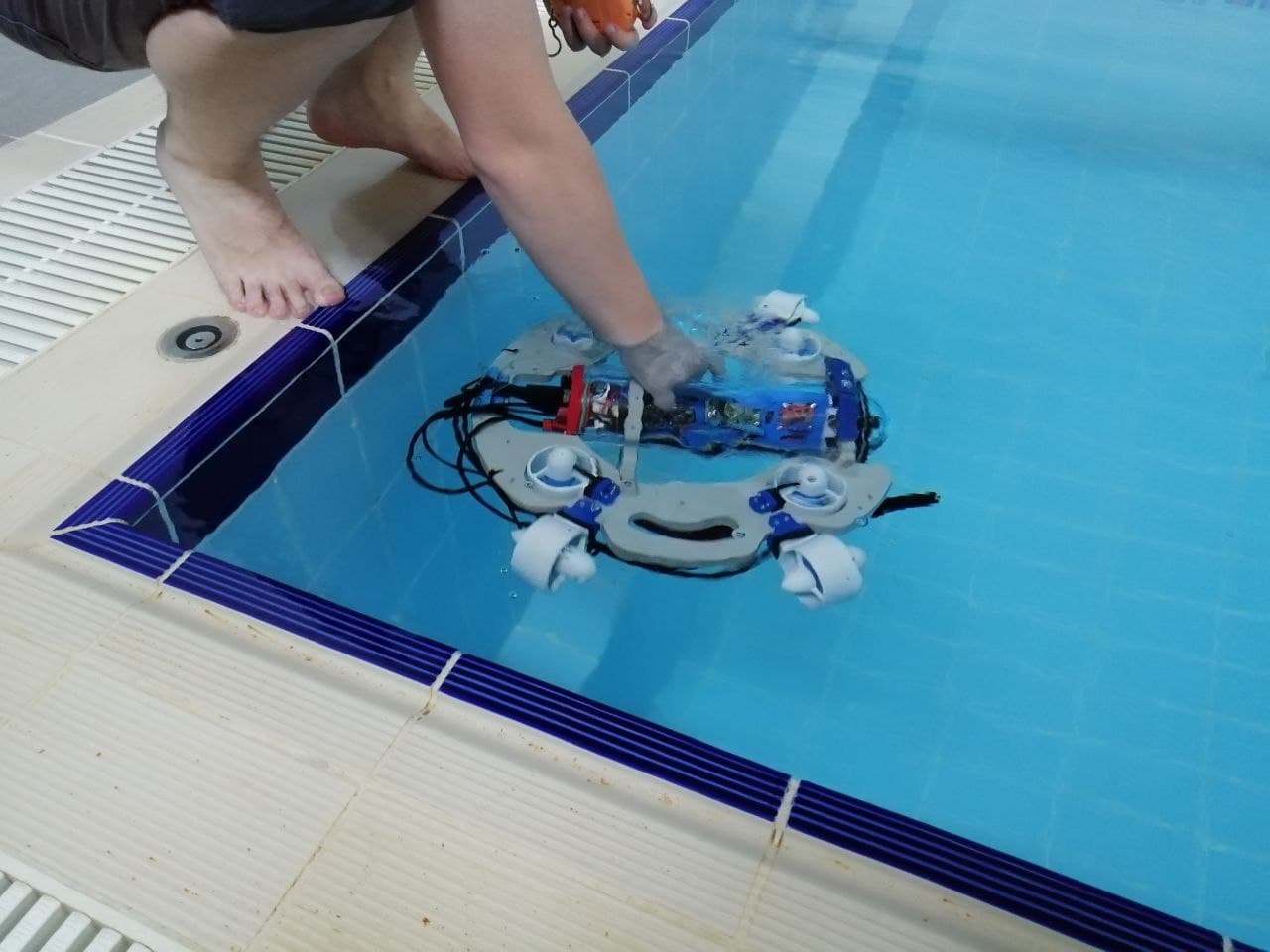
- Автономный необитаемый подводный аппарат «Пандора». Изготовлен для экспериментального подтверждения алгоритмов автономного управления и участия в международных соревнованиях Singapore AUV Challenge (г. Сингапур) и Robosub (г. Сан-Диего, США).
Основные научные направления деятельности
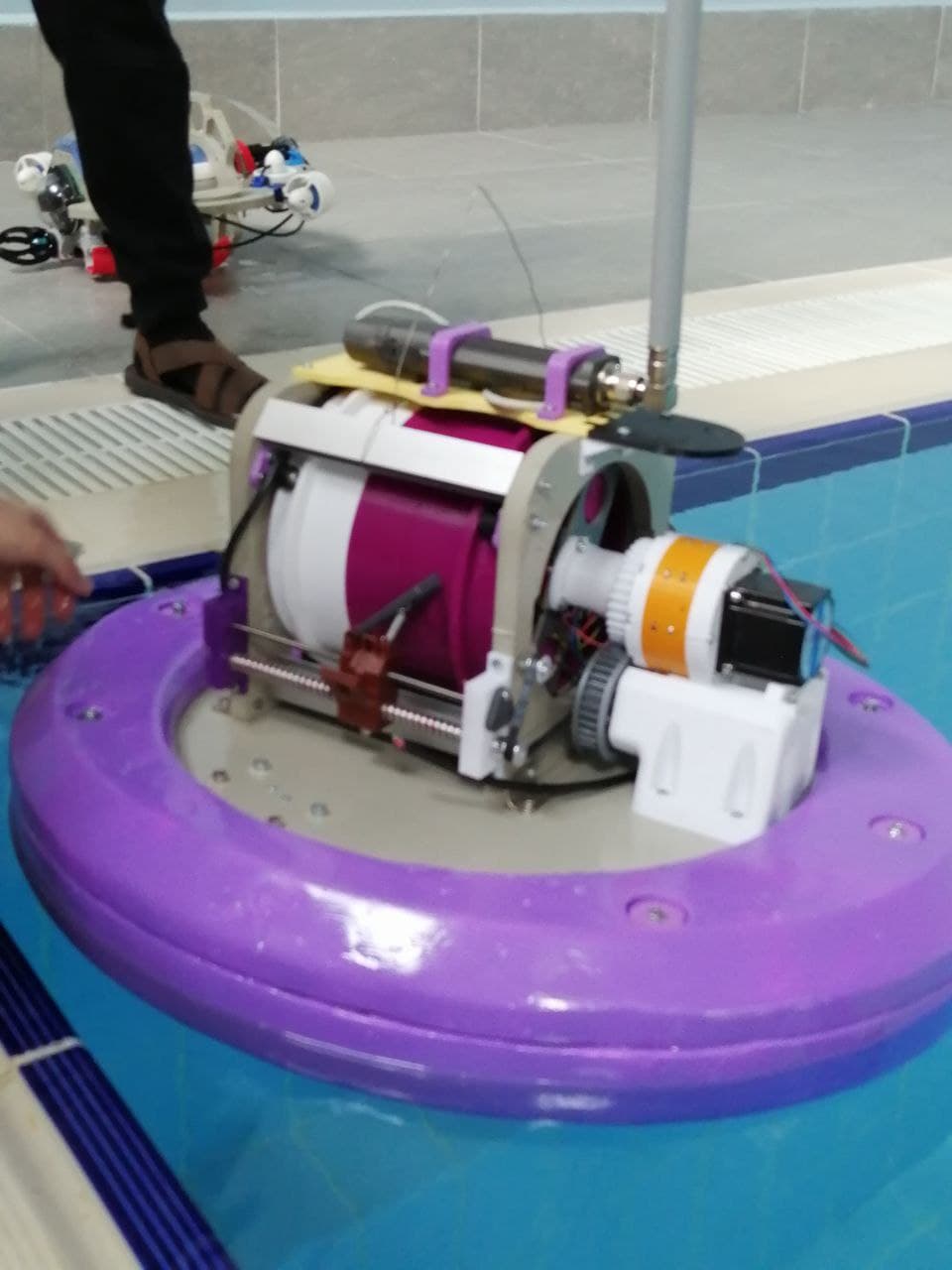
- Разработка систем подводной акустической навигации и передачи данных (совместно с кафедрой электроники и средств связи Политехнического института). На текущий момент разработан работающий прототип, запущен стартап, подготавливаются документы для серийного производства разработанного комплекса.
- Разработка реконфигурируемой архитектуры робототехнического комплекса с поддержкой мультиагентного взаимодействия (совместно с Институтом проблем морских технологий ДВО РАН). Разработан программный комплекс, на текущий момент дорабатывается. Успешно используется на всех разработанных подводных аппаратах ДВФУ и ИПМТ ДВО РАН.
- Разработка методов и алгоритмов управления телеуправляемого подводного аппарата при любой пространственной ориентации. Разработан алгоритм, проведена экспериментальная проверка работоспособности на ТНПА собственной разработки «Сокол тысячелетия».
- Разработка алгоритмов построения и онлайн реконфигурации планирования траектории движения автономного подводного аппарата. Разработан алгоритм, проведена экспериментальная проверка работоспособности на АНПА собственной разработки «Пандора».
Партнеры
- Центр проектной деятельности ДВФУ
- Политехнический институт ДВФУ
- Институт проблем и морских технологий ДВО РАН
Кадры
Выступают перспективные студенты, магистранты, аспиранты, молодые ученые, реализующие проекты различного уровня в области подводной робототехники, как из ДВФУ (Центр проектной деятельности (Технопарк «Русский»), Политехнического института), так и из ИПМТ ДВО РАН, обладающие большим опытом ведения деятельности в данной области.
Состав команды:
- Инженеры-электронщики, владеющие современными аппаратно-программными решениями и знающие особенности современных радиоэлектронных компонентов
- Конструкторы, способные реализовывать системы НПА различной сложности, учитывающие особенности поведения материалов в среде с изменением температуры, давления и других параметров.
- Программисты, реализующие системы машинного зрения, с применением современных алгоритмов и решений в области детектирования образов, машинного обучения
- Программисты, реализующие системы управления и стабилизации автономных систем, с использованием инерциальных датчиков, систем подводной навигации, а также систем глобальной навигации (GPS, ГЛОНАСС)
- Инженеры-математики, способные выполнять моделирование гидродинамических процессов, силовой части НПА, а также систем движительно-рулевого комплекса
- Менеджеры и руководители проектов, способные выстраивать процессы работы команды, обеспечивающие поиск точек коммерциализации проектов, получения грантов и субсидий различного уровня, а также в перспективе иметь возможность адаптировать и продавать технологии и разработки.
- Инженеры-исследователи, способные выполнять морские и речные эксперименты, составлять план эксперимента и анализ результатов.
Успехи студентов, работающих под началом представленных преподавателей:
- Всероссийские соревнования по морской робототехнике, категория ТНПА – 3 место, 2020 г.
- Всероссийские соревнования по морской робототехнике, категория АНПА – 3 место, 2020 г.
- Международные соревнования по автономной подводной робототехнике RoboSub (г. Сан-диего, США) – 2 место, 2019 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 1 место, 2019 г.
- Всероссийские соревнования по морской робототехнике, категория ТНПА – 1 место, 2019 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 3 место, 2018 г.
- Всероссийские соревнования по морской робототехнике, категория ТНПА – 1 место, 2018 г.
- Всероссийские соревнования по морской робототехнике, категория АНПА – 1 место, 2018 г.
- Международные соревнования по автономной подводной робототехнике RoboSub (г. Сан-диего, США) – 2 место, 2017 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 1 место, 2017 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 2 место, 2016 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 2 место, 2015 г.
- Международные соревнования по телеуправляемой подводной робототехнике MATE international Competition – 3 место, 2014 г.
- Международные соревнования по автономной подводной робототехнике RoboSub (г. Сан-диего, США) – 3 место, 2013 г.
- Международные соревнования по автономной подводной робототехнике Singapore AUV Challenge (г. Сингапур) – 1 место, 2013 г.
- Международные соревнования по телеуправляемой подводной робототехнике MATE International Competition – 1 место, 2012 г.